Efek welding saka welding robot kena pengaruh akeh aspek. Akeh pelanggan bakal nemoni sawetara masalah luwih utawa kurang sadurunge pinter nggunakake robot welding. Sejatine, masalah kasebut disebabake dening operasi sing ora bener utawa setelan robot sing ora bener, lan bisa ditanggulangi kanthi pangaturan sing cocog. Sabanjure, editor bakal nggawa sampeyan kanggo njupuk saham saka sawetara masalah sing asring dumadi ing nggunakake Yunhua welding robot lan solusi sing gegandhengan.
1. Gagal busur miwiti sak welding
1. Busur durung diwiwiti
Alesan: Ora ana prentah wiwitan busur sing cocog sadurunge nglakokake perintah pungkasan busur ing program sing wis diowahi
Cara pangolahan: Priksa manawa sampeyan nambahake siji printah pungkasan busur utawa kurang printah wiwitan busur
2. Gagal miwiti busur, deteksi sinyal salah
pendekatan:
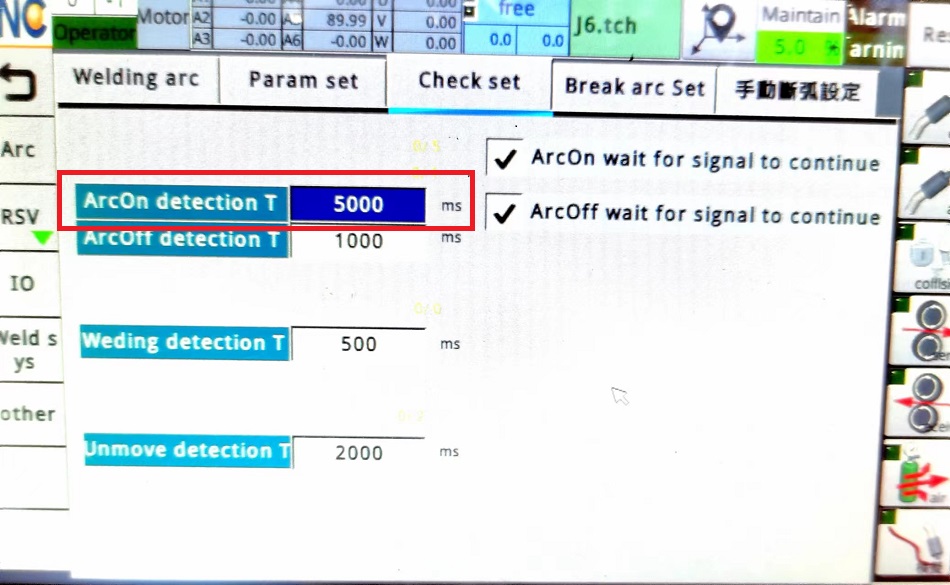
1) Priksa setelan wektu gangguan welding ing kaca parameter. Umumé, iku cocok kanggo nyetel wektu kanggo 5000ms.
2) Priksa manawa sinyal mesin las kasil dikirim menyang sistem
3) Priksa manawa workpiece wis grounded
3. Kawat Goreng Arc
alesan:
1) Saiki lan voltase ora cocog
Cara Processing: Kita kudu nyetel saiki lan voltase cocok miturut kekandelan nyata saka workpiece lan mesin welding
2) Dawane kawat las dawa banget
Cara perawatan: Umumé, dawa kabel welding 10 kanggo 15 kaping diameteripun saka kabel welding, lan dawa cocok saka kabel welding dipilih miturut diameteripun saka kabel welding.

Kakehan arus ndadékaké kanggo welds ora rata

Saiki lan voltase normal, las apik lan tenan

Pungkasan obor welding bakal bola kabel

Kawat mburi obor welding ing kondisi apik sawise welding normal
4. Fenomena pemadaman busur otomatis kedadeyan sawise arcing
Solusi: Priksa manawa ana masalah karo parameter wektu ora obah setelan wektu, lan priksa manawa obor welding wis dipindhah.
2. Arc break occurs sak welding
alesan:
1. Yen kabel welding ora ndemek workpiece, weker busur bejat bakal micu
Cara perawatan: Nyetel maneh posisi kabel welding lan workpiece, supaya kabel welding kebak kontak workpiece sak proses welding. (Nanging ora kudu cedhak karo benda kerja, bisa nyebabake las liwat benda kerja)
2. Path welding khayal nyebabake sirah gun kanthi otomatis munggah amarga tabrakan
Solusi: ngreset path welding
3. Kabel positif lan negatif saka mesin welding ing kontak miskin
Cara perawatan: Priksa kondisi kabel saka kabel positif lan negatif
3. Alasan kanggo Gagal busur pungkasan sawise welding
1. Gagal Arc, kesalahan deteksi sinyal
Alesan: Mesin las ora nampa sinyal saka robot, sing nyebabake robot gagal nutup busur.
pendekatan:
(1) Priksa manawa paramèter setelan cukup
(2) Priksa sinyal IO, lan priksa manawa sinyal titik pungkasan I ora normal. Yen sinyal I point tetep ON.
(3) Priksa manawa ana short circuit ing baris lan apa kabel lemah disambungake abnormally
2. Ora printah mandeg busur disetel sawise serangan busur

Alesan: Nalika weker iki kedadeyan ing pendant wulangan, priksa manawa sampeyan lali nambahake perintah pungkasan busur
Cara pangolahan: nambah printah pungkasan busur sawise printah wiwitan busur ing program
Jeksa Agung bisa ngetokake iki utamané pirso busur-miwiti, busur-breaking lan busur-pungkasan masalah related saka Yunhua welding robot sak proses welding. Yen pangguna nemoni masalah kasebut sajrone nggunakake, dheweke bisa ngrujuk marang solusi kasebut. Yen ora bisa ditanggulangi, goleki teknisi Yunhua kanthi tepat. bantuan.
Yen sampeyan pengin ngerti masalah sing luwih umum lan solusi saka Robot Yunhua, mangga digatekake Akun Resmi Robot Yunhua.
Robot welding Yunhua minangka robot otomatis sing nggabungake welding multi-fungsi kayata welding gas shielded, welding argon arc, cutting plasma, lan welding laser. Wis keluwesan dhuwur, daya adaptasi kuwat, efficiency welding efisien lan kualitas welding stabil, lan bisa digunakake digunakake ing macem-macem kothak. Kayata manufaktur mesin, manufaktur mobil, elektronik presisi lan pertambangan batu bara lan lapangan liyane.
Wektu kirim: Jul-15-2022



